
对人体自身动作的研究,对于假肢研究、人机交互等领域有重大意义。但在人体的动作研究过程中,力学传感器则是研究的关键。现阶段的力学传感器,在测量手的抓握行为时,会使得手指触觉上的偏差,因此导致手指抓握力测量上产生较大的偏差。,需要将传感器放在指尖,这些传感器会干扰手指、影响手指施加的力,导致无法精确再现自然触觉。
目前,在不损失任何触摸感觉的情况下监测手指触摸过程是最大的挑战。传统的传感器,乃至超薄传感器都会不同程度的降低触觉,使得测量结果产生偏差,不能真实的反应手指的触觉。柔性电子大牛,日本东京大学TakaoSomeya团队基于电纺纳米纤维,开发出了超级灵敏的电容式纳米网络压力传感器,可以准确的监测手指压力,并且不会对人产生感官影响。相关论文以“Nanomeshpressure sensor for monitoring finger manipulation without sensory interference”为题,于11月20日发表在《Science》上。
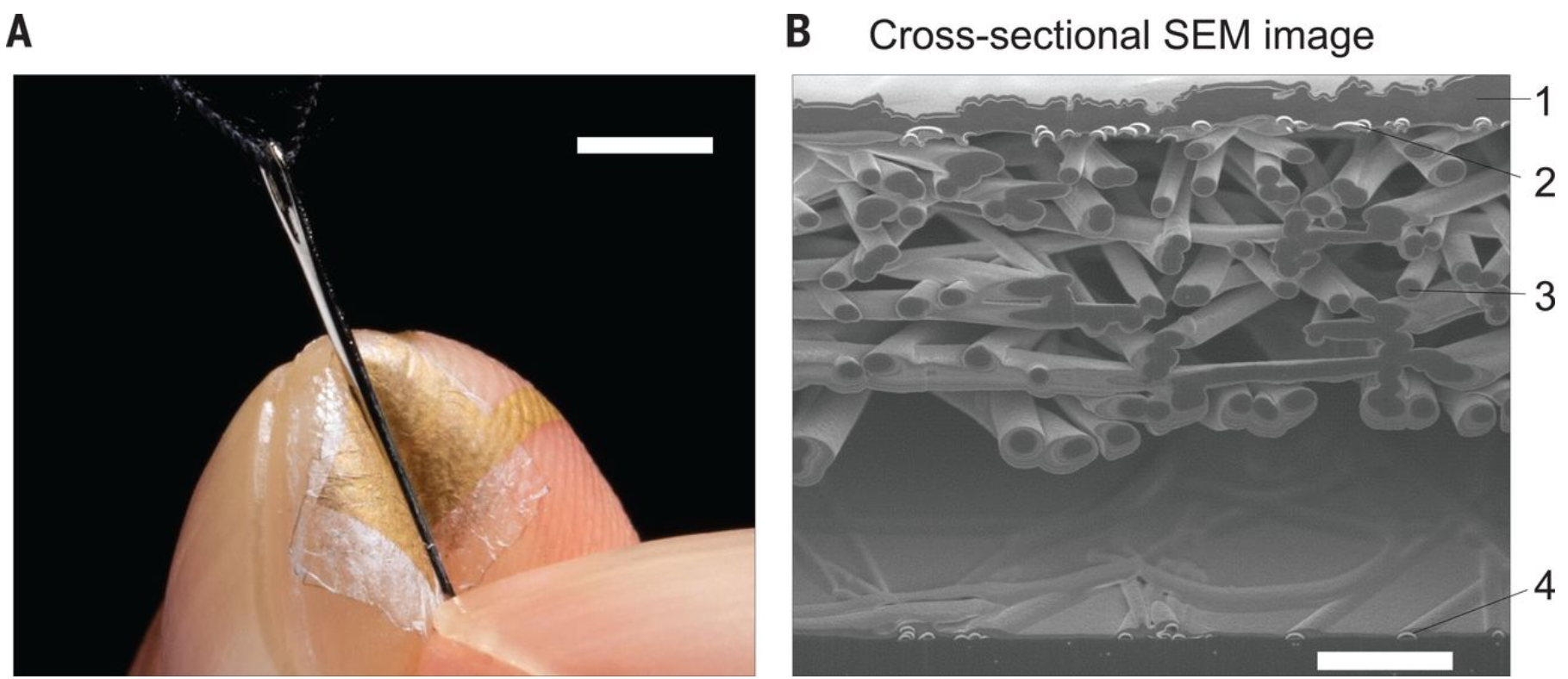
纳米网络压力传感器的结构
为了保证传感器不会影响手指上的触觉,因此传感器轻薄柔软的特性是成败的关键。Takao Someya团队采用了纳米级别的静电纺丝技术,采用了聚氨酯等柔性材料,保证了制作出的传感器的轻薄特性和柔软程度。聚对二甲苯涂层可以提高柔性力学传感器的灵敏度(压力低于1kPa时灵敏度为0.141kPa-1,高于10kPa时灵敏度为0.01kPa-1),而金纳米网络则保证了电信号的传输。该力学传感器为典型的电容器结构,整体结构分为四层,分别为嵌入纳米网络的聚氨酯钝化层、顶部金纳米网络电极层、涂有聚对二甲苯涂层的聚氨酯纳米网络中间层,底部金纳米网络电极层。该传感器主要通过形状的改变使得传感器整体电容的变化,以此反应力的大小。
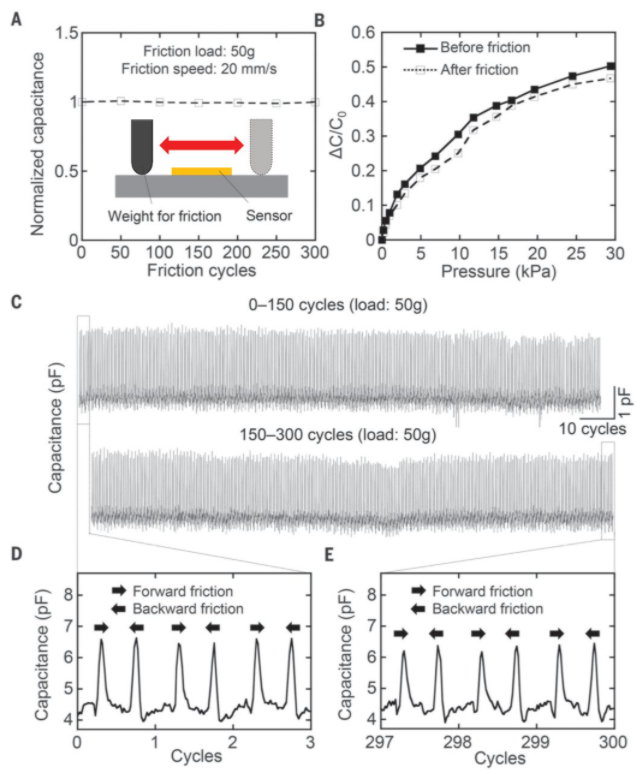
优良的结构稳定性
在传感器的制备过程中,纳米金网的形成利用了PVA纳米纤维作为牺牲材料,因此纳米金网与中间层有优良的结合力。以19.6 kPa的压力进行1000次循环测试后,其电容性能下降不到0.15%(电容变化在第一个周期为0.658,在第1000个周期为0.659)。除此之外,顶部Au纳米网络电极在重复循环施压过程中,导电性几乎没有变化。这些性能参数足以证明该传感器优良的结构稳定性,保证了在应用过程中的可重复性和性能稳定性。
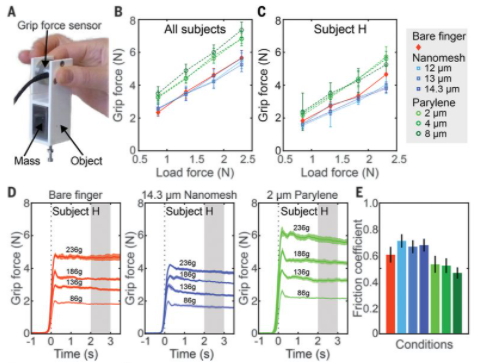
对手指触觉无影响
本文定量研究了传感器对人的触觉的影响,通对比在手指上贴上传感器与裸露的手指的抓握力,贴上传感器与裸露手指相差无几。而在贴了2微米厚的力学传感器后,手指的抓握力还增加了14%。
总结
Takao Someya团队通过纳米静电纺丝技术,制作出了一种超薄轻柔的力学传感器。通过一系列研究,验证了其对手指触觉的影响微乎其微,这一性能使得该传感器在人体动作研究中有十分广阔的应用前景,对人体仿生学领域具有十分重大的意义。
全文链接:
